

課程鏈結: 這裡
學習鏈結:
課程內容:
這裡先簡單的介紹整系列的課程內容,希望能讓大家了解這個課程想做什麼.
這整堂課主要是圍繞著 Cloud Computing 經常會使用到的技術與相關的概念. 整堂課其實只有一個程式語言作業:
使用 C++ 寫 Gossip Protocol
雖然課程裡面程式語言的作業不多,但是整體上的內容還算不少. 除了有談到一些雲端技術的基本概念:
- Map Reduce
- Multicasting and Gossip Protocol
- P2P Protocol and System
- K/V DB, NOSQL, and Cassandra (畢竟都談了 Gossip)
- Consensus Algorithm - Paxos, FLP Proof
其實課程內容很有料,也可以學到很多的東西.
前提:
Snapshots
Global Snapshot
Global Snapshot =
- Global State =Individual state + communication channel
時間不同步的時候所造成 Global Snapshot 會失敗的原因
- 時間不正確
- 無法抓到溝通的狀態
任何造成 Global Snapshot 變動的原因:
- Process send/receive message
- Process move one step
以一個範例來解釋演算法
基本定義:
- There are no failures and all messages arrive intact and only once
- The communication channels are unidirectional and FIFO ordered
- There is a communication path between any two processes in the system
- Any process may initiate the snapshot algorithm
- The snapshot algorithm does not interfere with the normal execution of the processes
- Each process in the system records its local state and the state of its incoming channels
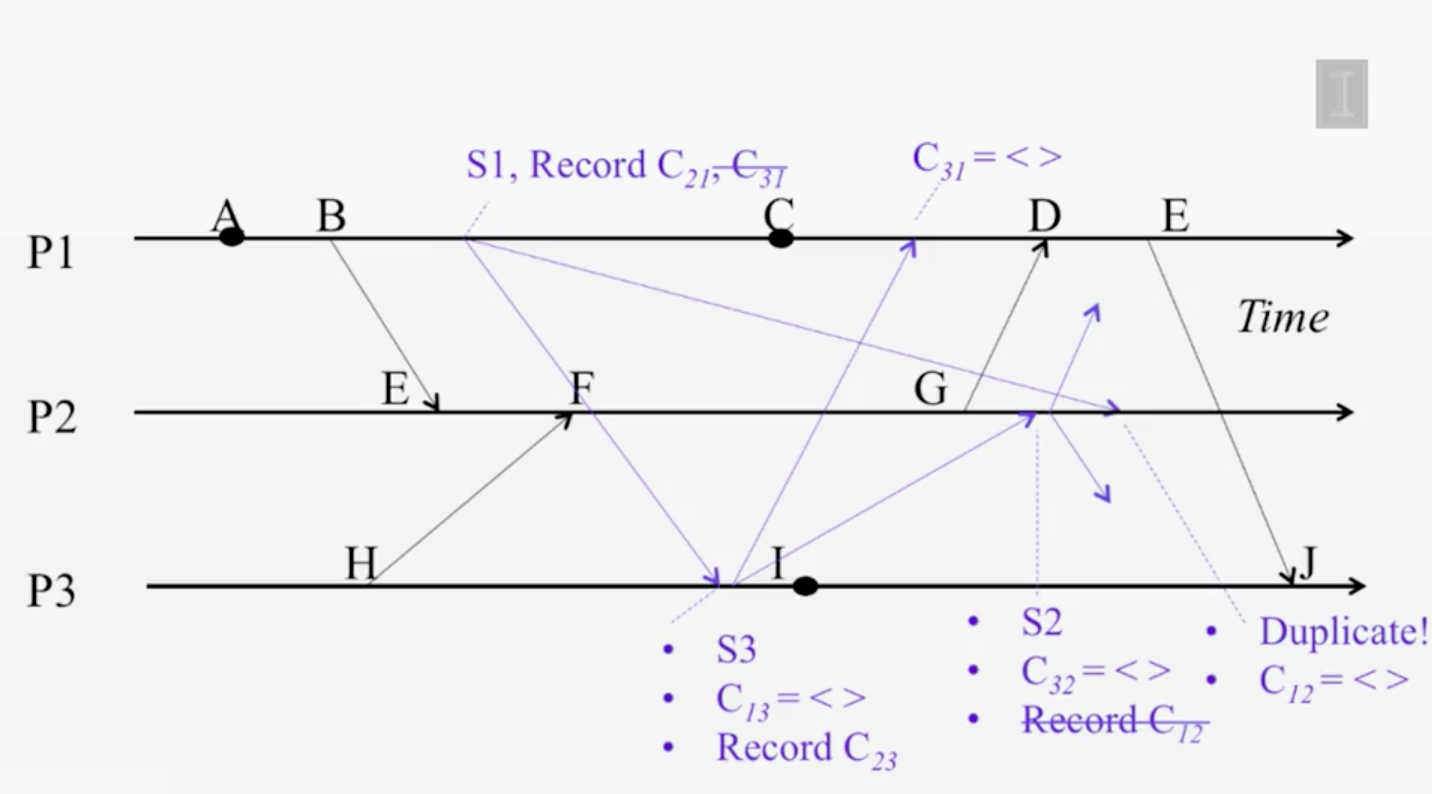
Chandy-Lamport Global Snapshot Algorithm
- 隨便挑一個 Process (\(P_i\)) 來對所有其他的 Process 傳送一個 Marker 訊息 \(C_ik\) )
- 並且開始記錄所有進來的 Message (InComing Msg)
- 如果收到的 Process \(P_j\) 並沒有收過 \(C_ij\)
- 先將該訊息 \(C_ij\) 的 State 標示為 “empty” 一樣開始傳送 \(P_jk\) Marker 給其他 Process
- 如果已經收過了
- 代表所有 Process 已經開始在傳遞 Marker 而其他訊息已經完整的到了.
- 停止條件:
- 當所有節點都收到 Marker 代表儲存的資料已經完成.
- 當所有 Process 收到其他訊息都是 Marker (需要有 N - 1 個)
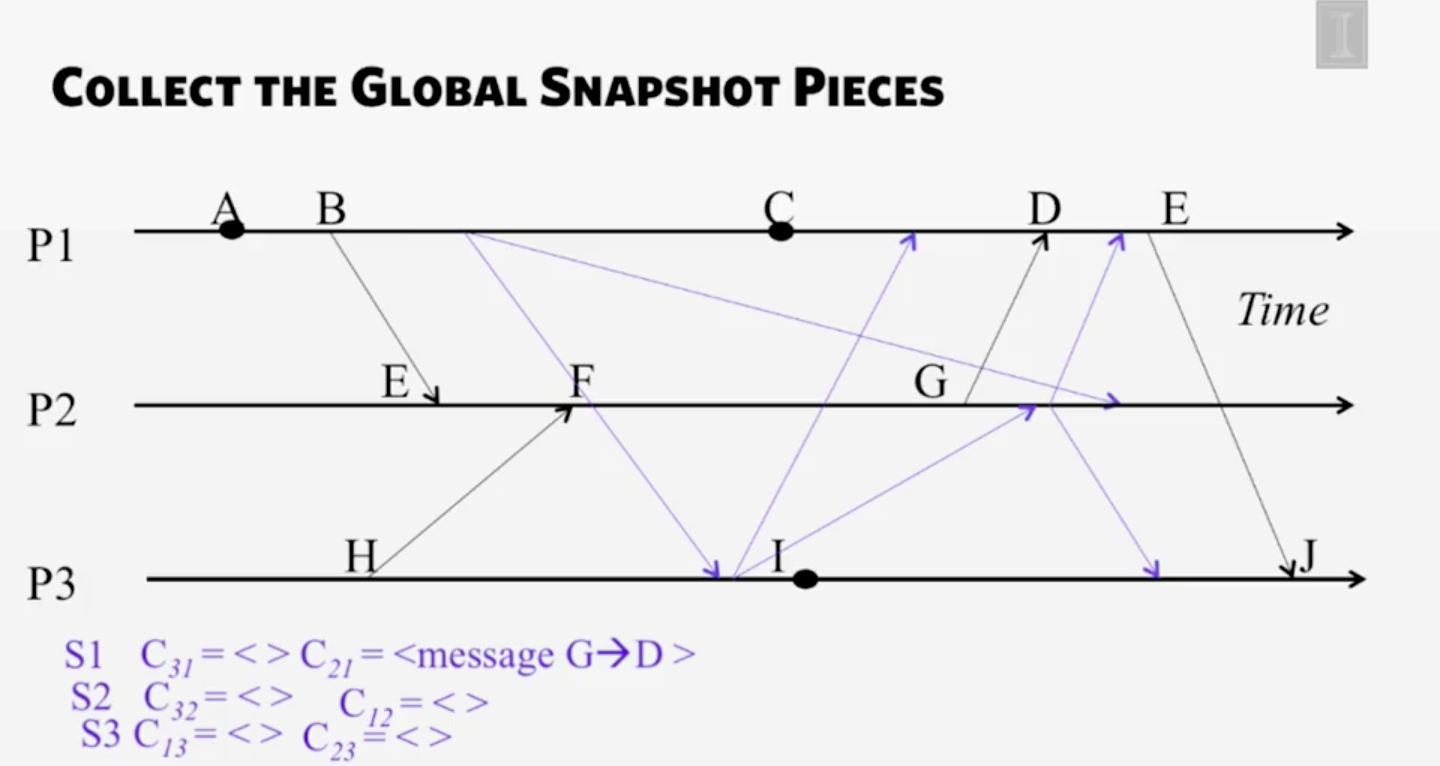
最後還要把各個分開的 Snapshot 組合成 Global Snapshot
停止條件,所有節點都收到 Marker 外,所有等待外部回來的資料 (marker) 也都收到.
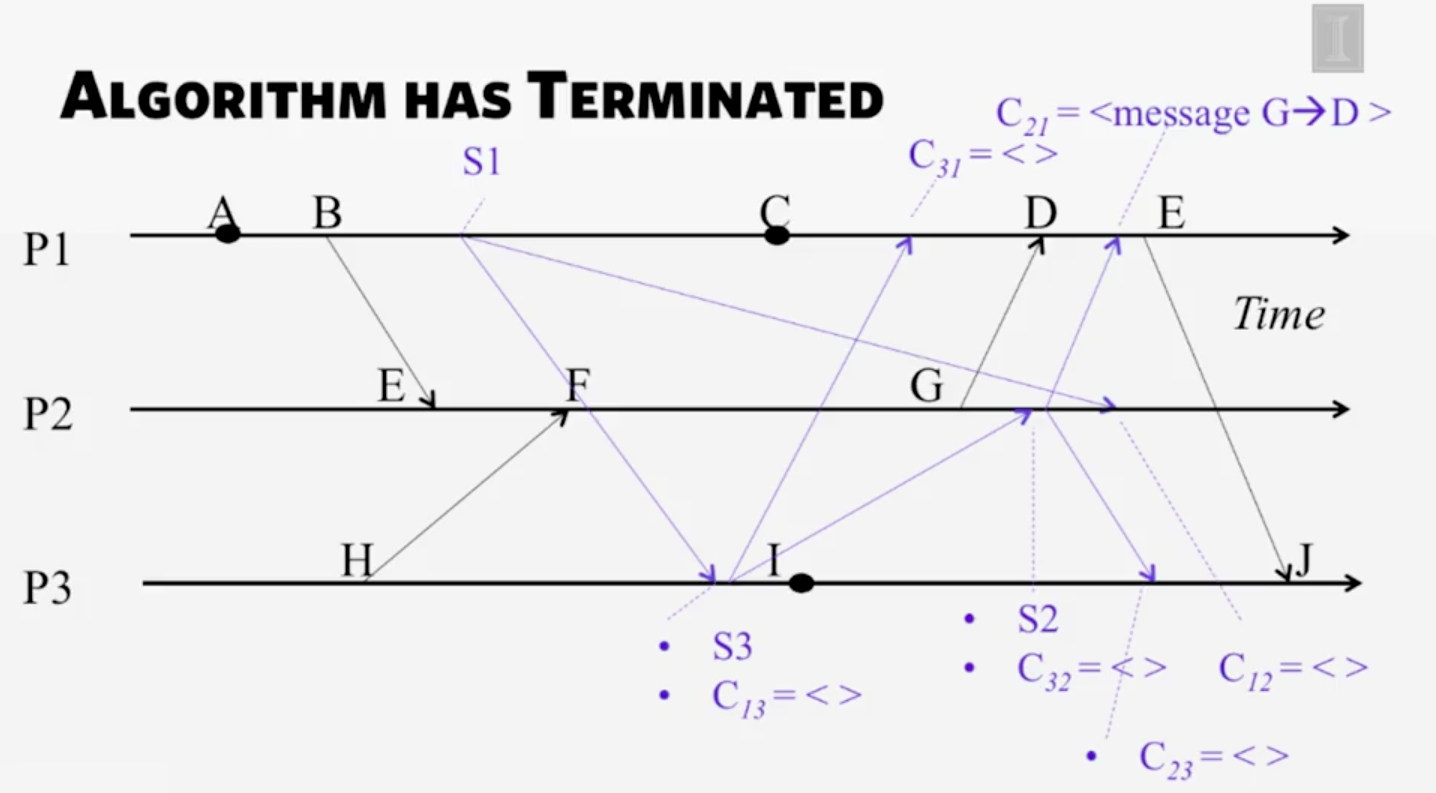
將 Snapshot 統一回收整理成一個大的 snapshot
P.S. 這個演算法並不記錄對外的資料,因為由收到資料的人統一來記錄結果.
Consistent Cut
講解到 Snapshot ,不免俗就要講到擷取 snapshot 的時間點 (cut).
Consistent Cut
- A cut C is a consistent cut if and only if: for (each pair of events e, f in the system)
也就是說每一個 pair f->e (f happen before e) 如果有 e in the cut 那麼必須 f 也必須要 in the cut. 反之不需要滿足.
透過 Chandy-Lamport Global Algorithm 截取的 Snapshot 都滿足 Consistent Cut
證明: \(e_j\) in the cut (透過 \(P_j\) 記錄到) 那麼 \(e_i\) (透過 \(P_i\) 記錄到) 必定也在 snapshot 之中.
- We already know \(e_i -> e_j\)
- We also know \(e_j\) in the cut but \(e_i\) not in the cut
- Because \(e_i -> e_j\) and \(P_i\) already record state for \(e_i\)
- Since \(e_i\) happen before \(e_j\), if \(e_i\) not in the cut so \(e_j\) must not in the cut too.
- Contracdition.
Safety and Liveness
Conrectness => Liveness or Safety
Definition:
- Liveness: something good eventually happen
- Safety: Guarantee something bad never happen
Chandy-Lamport Algorithm 與 Safety, liveness 的關係:
- 一旦 Stable 就會一直保持 Stable
- 只能滿足 Liveness but non-safety
Multicast
Communication 的種類:
- Unicast: 訊息從一個傳送者送到一個接收者
- Multicast: 訊息寄送給一群的人
- Broadcast: 訊息寄送給全部的人
Multicast Ordering
探討順序的時候,有以下三個方式的 multicast :
- FIFO Ordering
- Causal Ordering
- Total Ordering
FIFO Ordering:
這邊的 FIFO 代表的是,先發送的人就會被收到.(同一個 Process 上):
- 先發送的人,會先被人收到. (同一個發送的人,先後順序在某個節點上應該會保持一樣的順序.)
- Ex:
- \(P_i -> P_j, P_k, P_l\), \(P_m -> P_j, P_k, P_l\)
- 根據 FIFO 原理
- \(P_j\) 收到順序也會是 \(P_i (P_ij), P_m(P_mj)\)
Causal Ordering:
Causal Ordering 代表的是因果的關係,也又是接受到的人絕對比傳送的人還晚. (因為傳送過程的 latency) 這邊指的是跨 Processes ,的因果關係.
Causal Ordering -->(imply) FIFO Ordering
由於 Causal Ordering 可以跨 processes 跟同個 process . 如果是在同個 Process 的話,就是指的是先入先出 (FIFO) 因為同一個的先後順序必定影響該 multicast 的順序.
Total Ordering:
所有 process 收到訊息的順序都相同.
Hybrid ordering
- FIFO-Total:
- Causal-Total:
Implement of multicasting

Implement FIFO Ordering
拿這張圖來解釋如何讓 FIFO Ordering 能夠滿足:
- P1 有兩個 multicasting [1,0,0,0] 與 [2,0,0,0]
- 會看到在 P3 那邊 [2,0,0,0] 比起 [1,0,0,0] 先到
- 所以後面的需要先等一下 (buffered) 改成 [0,0,0,0] 等到後面到了才能改.
- 但是 P1, seq: 2 與 P3 seq: 1 不會有這樣的問題.因為 FIFO Ordering 並不局限於跨線程
About total ordering
就是計算每個人收到的順序必須要跟開始發送的順序一樣(可跨程序) 就算是.計算的方式就是去累進收到的順序.
Implement Causal Ordering
滿足條件:
所有的接收者都必須有著相同的接受順序(跨程序).
If multicast(g,m) -> multicast(g,m’)
then any correct process that
delivers m’ would already have
delivered m.
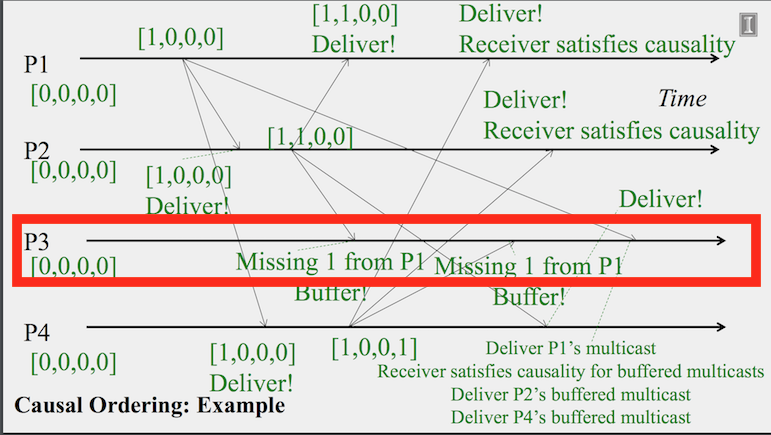
做法:
- P1 與 P2 原本就滿足 Causal Ordering ,故不提.
- P3 先收到 P2 msg ,這時候就知道要等待 P1 msg 因此就 buffer
- P3 後來又收到 P4 msg ,又必須要等待 P1 msg 所以就 buffer
- P3 要一直收到 P1 msg 之後,才會把 P2 與 P4 msg 收起來
- 如此一來就滿足 Causal Ordering
Reliability of multicast
Reliability = Correctness = Ordering
在此討論的 Reliability 都是基於 non-Faulty (沒有錯誤發生的) process 上面來討論.
現實中的實現方式
在現實中如何透過實現類似 multicast 的確保方式?
每個 process 收到之後,在發送 multicast 給其他 process 作為標記
透過這樣的方式,才能確保每個 process 收到的 msg 順序是正確的,因為順序需要有外部的資訊來紀錄.
Virtual Synchrony
View
每個 Process 都維護一套自己的 member list ,那樣的 member list 就稱為 “View”
View Change
當 Process 發生了 “新增”, “離開”, “故障” .. 等等影響 member list 的事情就稱為 View Change
Virtual synchrony
Virtual Synchrony 保證所有的 View Change 都會發生於相同的順序上.
ex:
- P1 join
- {P1, P2}, {P1, P2, P4} , {P1, P2, P3} are all view change
- 所以 P2 會收到 一樣順序 {P1, P2}, {P1, P2, P4} , {P1, P2, P3}
Paxos
Consensus Problem
問題釐清:
為何 SLA 永遠都是 five-9' 獲釋 seven-9' 永遠不能夠 100%?
解答:
所謂的錯誤,不光是任何人員控管與公司流程上的錯誤.當然也不在於機器本身的錯誤. 而是在於是否能夠達到一致性( Consensus ).
Consensus Statement:
Consensus Constraints:
- Validity: 需要全部人提議相同數值才能決定.
- Integrity: 最後決定的數值必定是某個 process 提議出來(不是無中生有)
- Non-triviality: 至少有一個初始狀態,而不是常見的 all-0, all-1
Consensus In Synchronous Systems
Synchronous Systems 的特性:
- 訊息有時間限制
- Process 間交換訊息有時間限制 (round: f, upper bound)
如果能夠解決 Synchronous Systems 的一致性 (Consensus) 問題 ,那麼是否能夠解決 Asynchronous System
–> 將訊息交換的時間限制延長到 N
Paxos
關於 Paxos
並沒有完全解決 Consensus 的問題,
但是可以提供兩種主要特性:
- Safety:
- 不違背一制性
- Evantual liveness:
- 如果有問題發生,還是可以達成一制性. (但是不保證,原因後續)
並且在以下系統都有使用:
- zookeeper
- Chubby
Paxos 三個階段:
Election
- 每個節點 (node) 會送出 election request
- 需要達到大多數 (majority) (或是稱為 Quorum)
- Paxos 允許 multiple leader (這裡先不討論那麼複雜)
產出會有一個(或多個) Leader
Bill
- Leader propose value (v)
- 如果節點同意會回覆
Law
- 如果 Leader 獲得大多數的同意
- 會發出 Law (or Learn) request 給每個節點,確認數值的紀錄

